



Der PEEK-Roboter-RV-Reduzierer ist ein hochpräzises Reduktionsgerät, das PEEK-Verbundwerkstoffe (Polyetheretherketon) auf die RV-Getriebestruktur (Rotary Vector) aufträgt und so die hohe Steifigkeit von RV-Reduzierern mit dem geringen Gewicht von PEEK-Materialien verbindet. Im Folgenden finden Sie eine Einführung aus den Bereichen Strukturinnovation, Materialeigenschaften, Leistungsindikatoren und Anwendungsszenarien:
I. Strukturinnovation
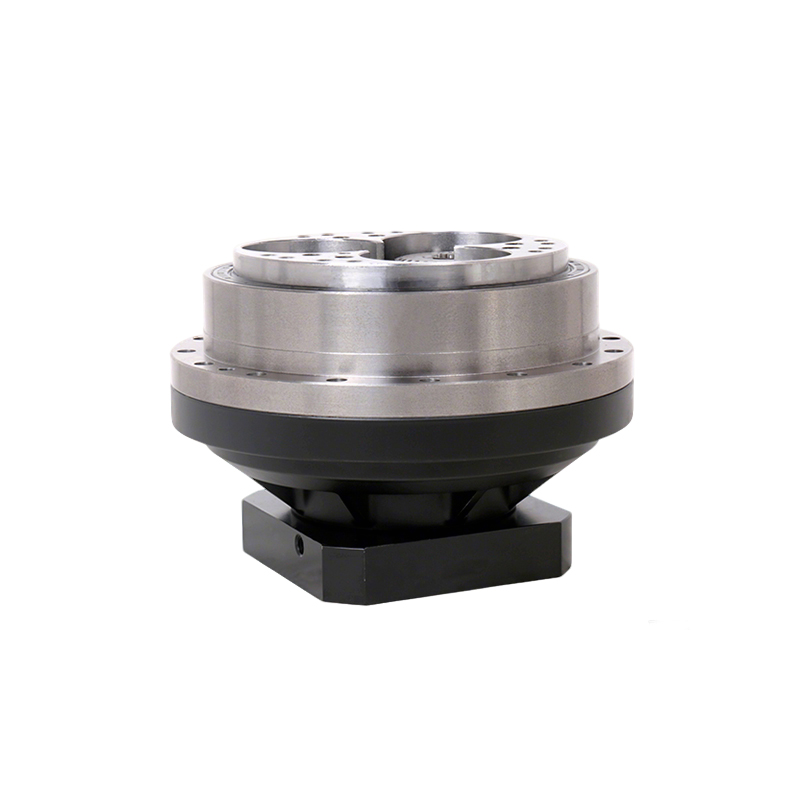
Es verfügt über eine zweistufige Untersetzungsstruktur: Die erste Stufe ist eine Planetengetriebeuntersetzung (Sonnenrad + 3 Planetenräder), die zweite Stufe ist eine Zykloidenraduntersetzung (2 Zykloidenräder mit einer Phasendifferenz von 180°). Die Kernkomponenten des Getriebes bestehen aus 30 % kohlefaserverstärktem PEEK-Spritzguss, die Stiftzähne sind PEEK-Metall-Verbundstrukturen (verschleißfeste PEEK-Schicht außen + Stahlkernwelle) und das Lagergehäuse der Exzenterwelle integriert selbstschmierende PEEK-Buchsen, die einen langfristigen Betrieb ohne Öl ermöglichen. Die Gesamtstruktur wird durch Finite-Elemente-Topologie optimiert, wodurch die Anzahl der Teile im Vergleich zu herkömmlichen RV-Untersetzungsgetrieben aus Stahl um 25 % reduziert wird.

II. Materialeigenschaften
Vorteilhaftes Verhältnis von Festigkeit zu Gewicht: Die Zugfestigkeit des PEEK-Zykloidenrads erreicht 180 MPa bei einer Dichte von nur 1,45 g/cm³, was das Gewicht im Vergleich zu Stahl-Zykloidenrädern um 55 % reduziert. Gleichzeitig wird die Biegefestigkeit der Zahnwurzel durch die Ausrichtung der Kohlefasern um 40 % erhöht.
Dynamische Leistung: Der Materialdämpfungskoeffizient beträgt 0,02 (0,001 für Stahl), wodurch das Übertragungsgeräusch um 15–20 dB reduziert und die Resonanzfrequenz auf über 3000 Hz erhöht wird.
Umweltverträglichkeit: Es behält stabile mechanische Eigenschaften im Temperaturbereich von -60 °C bis 220 °C, ist beständig gegen Hydrauliköl- und Getriebeölerosion und erfüllt die Anforderungen der Schutzstufe IP67.

III. Kernleistungsindikatoren
Übertragungsgenauigkeit: Spiel ≤ 15 Bogensekunden, Wiederholungspositionierungsgenauigkeit ±5 Bogensekunden, Leerlauf-Startdrehmomentschwankung ≤ 3 %.
Tragfähigkeit: Nennausgangsdrehmoment 80–300 Nm (entsprechende Modelle RV-40 bis RV-110), kurzfristiger Überlastfaktor 2,5-fach.
Effizienz und Lebensdauer: Übertragungseffizienz 94 %–96 % (bei 2000 U/min Eingang), MTBF (mittlere Betriebsdauer zwischen Ausfällen) psssst 20.000 Stunden (unter Nennbedingungen).
IV. Typische Anwendungsszenarien
Humanoide Roboter: Teile mit hoher Belastung, wie Hüftdrehgelenke und Kniegelenke, wie die Hüftgelenkantriebseinheit von Tesla Optimus (erfordert Untersetzungsgetriebe der Klasse 200 N・m).
Industrieroboter: J2/J3-Achsen von sechsachsigen mechanischen Armen, die herkömmliche Schwingungsunterdrücker ersetzen, um eine höhere Steifigkeit zu erreichen.
High-End-Ausrüstung: Roboter zur Handhabung von Halbleiterwafern, Endeffektoren für chirurgische Roboter, die gleichzeitig die Anforderungen an geringes Gewicht und Positionierungsgenauigkeit im Mikrometerbereich erfüllen müssen.











